Sintonia de PID pelo Método de Ziegler-Nichols
5.37k views2824 WordsCopy TextShare
Sob Controle
Link apoia-se:
https://apoia.se/ytcsc
Projeto TeCoLab:
https://github.com/ytcsc/TeCoLabReferências
...
Video Transcript:
é uma abordagem puramente matemática para o estudo de controle automático é sem dúvidas a mais desejável do ponto de vista de precisão e agilidade infelizmente Entretanto a matemática da área de controle envolve uma variedade tão desconcertante de funções exponenciais e trigonométricas e um engenheiro comum não tem tempo para lidar com ela e encontrar uma solução para o seu problema é com essa frase que John sigler e Nathaniel únicos abrem o seu artigo publicado em 1942 intitulado sintonia ótima para controladores automáticos e apresentam ao mundo que ficará conhecido como os métodos de ziegler-nichols se você quer
aprender de uma vez por todas o método deles e de quebra saber um pouco mais sobre essa história fique até o fim deste vídeo e [Música] a nossa história começa em uma empresa chamada Taylor instrumentos Company que foi fundada em 1850 e uma cidade de rochester Nova York a Taylor se dedicava inicialmente a produção de instrumentos de medição caseiros e industriais como termômetros e barômetros e naturalmente começou a atuar também em automação industrial como passar das décadas a área de automação se acelerou uma vez que as demandas da indústria cresceram e nos anos 1930 as
empresas de automação como a Taylor estavam em uma corrida de pesquisa e desenvolvimento o objetivo era colocar no mercado um controlador Industrial automático versátil e confiável em 1939 a Taylor finalmente vence a corrida que travava com as suas concorrentes lançando ofuscou sem e ele era um controlador Industrial automático fruto do aperfeiçoamento de um de seus projetos já existentes esse controlador era especial pois implementava de fábrica três ações de controle diferentes a ação proporcional o reset automático e apressam ou em termos modernos ações proporcional integral e derivativa Mas qual a dificuldade desse projeto você pode se
perguntar hora meu jovem implementador de p&d no Arduino lembre-se que no ano de 1940 não havia computadores Ou pelo menos não como conhecemos hoje Afinal o primeiro transistor só surgiria daqui 7 anos e portanto esses controladores e sistemas de medição industriais eram mecânicos comumente baseados impressão pneumática só que era muito difícil construir um sistema de atuação linear e assim a maioria dos controladores com válvulas de pressão era um Essência um off quando a Taylor lança ofuscou sem a indústria finalmente tem acesso a um controlador com região linear significativa só que com isso um novo problema
surgiria como os clientes poderiam configurar esse controlador para automatizar seus diversos processos perceba que na época a maioria dos Funcionários das fábricas mal tinham ensino médio E como tá o público poderia sintonizar um controlador Industrial parametrizando três ações de controle diferentes foi sobre esse problema que dois funcionários da tê-los se debruçaram de 11 ler do departamento de vendas técnicas e Nathaniel únicos do departamento de pesquisa e desenvolvimento sobre João ziggler temos poucas informações nenhuma foto dele na internet eu consegui achar Aliás se você encontrar me avise nos comentários e o que se sabe sobre ele
aquele nasceu em 1909 faleceu em 1997 durante seu tempo na Taylor instrumentos ele trabalhou no departamento de vendas técnicas já Nathaniel únicos é uma figura bem conhecida na área de controle e até entrevistas com ele podem ser encontradas no YouTube Nicolas nasceu em 1914 e coincidente mente também faleceu em 1997 em 36 ele recebeu o título de bacharel em química e no ano seguinte o título de mestre em física trabalhou durante a Segunda Guerra Mundial e no período pós-guerra no desenvolvimento de sistemas de posicionamento de radar os resultados deste trabalho seriam publicados no livro teoria
do servo mecanismos Além disso ele foi o presidente da sociedade de sistemas de controle da i368 do Conselho americano de controle automático entre 74 há 35 essas duas figuras juntas publicaram em 1942 um artigo chamado sintonia ótima de controladores automáticos esse artigo foi publicado na asm sigla para a sociedade americana de engenharia mecânica E propõe uma metodologia experimental para sintonia desses novos controladores basicamente você pega o sistema que quer controlar faz um ensaio simples coleta os resultados EA partir dele sintoniza o seu controlador simples assim sem nenhuma matemática além de simples contas de soma e
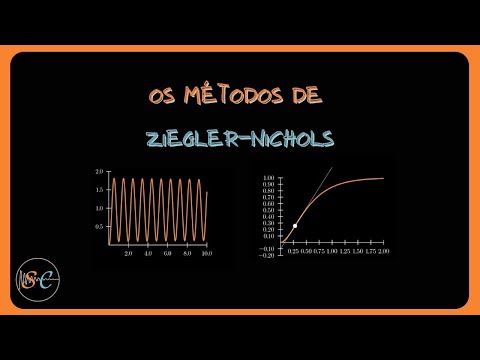
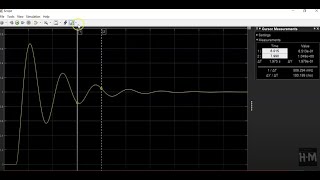
multiplicação Mas será que funciona mesmo para responder isso Temos que conhecer os métodos propostos o Zig nikos propõe dois métodos o primeiro que vamos ver é o método do ganho crítico nele nós pegamos a planta para qual queremos sintonizar um controlador pd E começamos fechando a malha de controle com o controlador puramente proporcional para exemplificar Vamos considerar uma planta representada por uma função de transferência de terceira ordem Mas não se preocupe pois isso aí relevante já que na prática você não precisa saber nada entre aspas sobre o seu sistema com esse sistema realimentado nós vamos
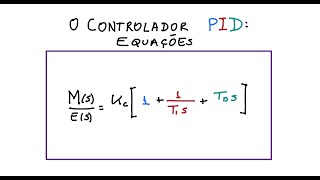
aumentando gradualmente o ganho desse controlador proporcional até atingirmos o ganho crítico esse ganho é caracterizado pelo surgimento de uma oscilação sustentada na resposta da planta é uma vez que as oscilação ocorre nós anotamos duas informações sobre ela o valor do ganho que causou essa oscilação que ao ganho crítico e o período dessa oscilação que chamamos de período crítico essas duas informações podem ser usadas para parametrizar o controlador perder Aqui estamos considerando um controlador dessa forma com essa expressão onde o ganho proporcional multiplica as três ações de controle e as ações integrativas e derivativos são caracterizados
pelos tempos de integração e derivação respectivamente é claro que existem formulações de controladores perder um pouco diferentes e que para elas os resultados apresentados a que precisam ser convertidos mas vamos continuar com essa representação que a mais tradicional agora basta escolher Que tipo de controlador eu quero eu posso sintonizar um controlar e o PTI ou Page para todos eles o valor do ganho e dos tempos depende apenas do ganho crítico e do período crítico do nosso ensaio e podem ser obtidos com essa tabela para você comparar os resultados veja como fica a resposta do nosso
sistema de exemplo para esses três controladores sintonizados dessa forma e o controlador P tem um pequeno erro em regime como esperado devido à ausência de um polo na origem o controlador pi tem uma excessivo tempo de acomodação mas o p&d parece muito bom não concorda Então esse método é perfeito Calma lá para atingirmos a oscilação do ensaio do ganho crítico precisamos levar o sistema para esta habilidade Marginal Isso significa que o sistema está em vias de se tornar instável e ter uma resposta Divergente e para alguns sistemas e só pode ser extremamente perigoso em viável
Já pensou sintonizar o controlador de uma usina nuclear ou de um avião levando os à beira da estabilidade não dá né um outro problema é que para alguns sistemas pode ser impossível atingir a estabilidade Marginal é isso aconteceria por exemplo com sistemas de primeira ordem nesse caso não importa o ganho escolhido eu nunca obtenho uma oscilação sustentada na saída da planta então nesses casos talvez eu possa aplicar um outro método e o outro método proposto por ziggler iníquos é o método da curva de reação onde aplicamos um degrau unitário na planta e levantamos sua resposta
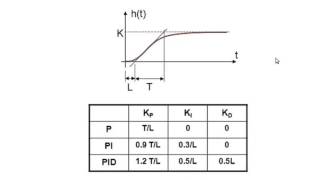
para sempre ficar Vamos considerar um sistema qualquer e simular sua resposta ao degrau o que nós esperamos da saída da planta uma curva em um formato que lembra um s que chamaremos de curva de reação de posse dessa curva nós achamos o ponto de inflexão ou seja o ponto com maior derivada agora nós traçamos uma reta tangente a esse ponto que pode ser representada pela equação da reta y = x + b e tudo que nós precisamos para sintonizar nossos controladores são os parâmetros dessa reta parece que envolve muita matemática mas na verdade poderíamos imprimir
esses dados e fazer tudo com lápis e régua primeiro a inclinação R dessa reta é a mais a taxa de variação da resposta do sistema e depois nós verificamos no gráfico atraso chamado de L que é o ponto no tempo onde a reta intercepta o eixo horizontal o ou seja basicamente estamos interpretando o nosso sistema como um sistema de primeira ordem com atraso e você pode fazer uma pergunta esse no meu sistema eu não puder aplicar um degrau unitário mas apenas um degrau de outra magnitude não tem problema assumindo a linearidade do sistema tudo o
que você precisa fazer é dividir a maior derivada que você encontrar pela magnitude do degrau aplicado e assim você encontra o parâmetro R esperado para o degrau unitário depois nós consideramos a mesma estrutura de controlador perder e podemos sintonizar os parâmetros conforme as sugestões de ziggler enix para o nosso sistema de exemplo aqui estão as respostas esperadas desse controlador a estrutura up não segue a referência com erro zero devido à ausência de integrador e o p item muito sobre esse a incomodação lenta já estrutura completa de perder aparentemente teve um Bom desempenho se acomodando rapidamente
obtendo o erro nulo em regime permanente e com sobre esse sinal menor que o controlador P entretanto esse segundo método também não é universal um caso em que ele não pode ser aplicada quando o nosso sistema não apresenta uma resposta com formato de curva de reação um caso clássico é quando o nosso sistema possui um integrador ou seja um polo na origem esse tipo de processo que ziggler iníquos chamam de processos em controle próprio podem ser exemplificadas por um nível de líquido em um tanque e um motor elétrico DC este método também não pode ser
aplicado se por qualquer motivo não temos como parar o funcionamento atual da planta para executar esse outros tipos de ensaio com base na prática esse método funciona para responder isso vamos recorrer a nossa plataforma didática até collab se você quiser saber um pouco mais sobre ela o link para o projeto no leite ramo está na descrição do vídeo a garota colar bem Nós escolhemos aplicar o segundo método da curva de reação os dados experimentais levantados foram esses Nós escolhemos esse método pois sabemos que a dinâmica térmica pode comumente ser modelada como um sistema de primeira
ordem com atraso no caso atraso L foi de 14 segundos note porém que o nosso de grau de potência na entrada não é unitário mas sim de 10 porcento da potência máxima bom então para achar a maior taxa de variação para o degrau unitário de um por cento precisamos dividir a maior taxa de variação achada no gráfico por essa isso nos daqui R é 0,0 12 graus por segundo de posse dos parâmetros LR podemos olhar as recomendações de ziggler iníquos para sintonia de um controlador aqui computei os ganhos para as três estruturas e escolhi implementar
o p&d para o ganho proporcional do perder eu escolhi dois sobre r&l ou seja o extremo da faixa indicada agora como implementar bom primeiro eu posso escrever a função de transferência do controlador chamado de cdse a partir de sua expressão temporal agora eu vou fazer uma pequena modificação de ordem prática nessa função de transferência que será incluir um polo pena parcela do derivativo é feito para tornar aquela parcela causal e o valor DP deve ser escolhido de forma não influenciar significativamente na dinâmica da planta para este projeto escolhi P = 10 o que parece ser
rápido o suficiente só que não adianta eu ter a função de transferência em tempo continuou se minha implementação ocorrerá no computador que é digital Então eu preciso discretizar o controlador que eu acabei de projetar para fazer isso eu usei aproximação de teste também chamada de bilinear e considerei a taxa de amostragem do meu controle de 0,2 segundo com isso obtém agora uma função de transferência tempo discreto que eu posso implementar no te colar bem Python diretamente a partir dessa expressão obtida e agora é só testar eu escolhi testar para uma referência 5 graus acima da
temperatura ambiente o que eu sugiro para você é pause o vídeo e pense um pouco sobre o que você acha que vai acontecer e aqui estão os resultados comportamento estranho não bem diferente do que havíamos simulado até aqui para entendermos o que está acontecendo vamos olhar para entrada de controle ou seja aquilo que o controlador está mandando para nossa plataforma é um estranho O que será que está acontecendo aqui calma que eu te explico primeiro temos duas linhas coloridas Azul EA vermelha a vermelha é o que o nosso controlador computou Só que as vezes ele
calculou o valor a ser aplicado na plataforma maior que 100 porcento da potência máxima o que não é possível outras vezes entretanto ele calculou o valor abaixo de zero por cento isso equivaleria a tirar energia térmica do sistema o que também não é possível se meus atuadores são apenas resistores esse comportamento de limites na ação de controle possível se chama de saturação e a linha azul é igual a vermelha só que saturada Ou seja quando a vermelha está entre 0 e 100 porcento Azul coincide com a vermelha Porém quando a vermelha é sede os limites
de zero sem por cento azul é igual ao limite violado então de fato o que está sendo aplicado no sistema é a linha azul entendido isso existem pelo menos três fenômenos estranhos que precisamos explicaram primeiro o que é aquele pico gigante de potência no início ele ocorre quando aplicamos o degrau de referência veja que no início a temperatura da plataforma é igual a do ambiente quando eu informo para o controlador que agora a temperatura deveria ser cinco graus acima do ambiente aparece um erro de 5 graus de um instante para o outro e essa variação
rápida do erro incita uma resposta agressiva da parcela derivativo do controlador segundo fenômeno O que é aquela barriga negativa no valor calculado pelo controle Isso se chama em inglês de integral ainda quando a temperatura passa do valor de referência o erro se torna negativo e assim o controlador conclui que é necessário tirar energia do sistema para baixar sua temperatura só que isso é impossível pois o limite do atuador é zero por cento não dá para aplicar potência negativa e assim a temperatura de cresce lentamente só que o controlador não sabe nada disso para ele o
erro é negativo e o que ele está fazendo não está adiantando e por isso ação integral vai ser carregando se intensificando na tentativa de baixar a temperatura mais rapidamente depois mesmo quando a temperatura passou para abaixo da referência e o erro é positivo novamente a parcela integral está tão carregada que continua aplicando ação negativa por um tempo e um pedindo a subida da temperatura que deveria acontecer a partir desse momento é o terceiro fenômeno é o ruído bem visível a partir dos 500 segundos ele ocorre pois nosso sistema é real e por isso sensores de
temperatura tem pequenas variações apesar dessas variações serem de pequena amplitude elas são rápidas acontecendo de um instante de amostragem para o outro por isso elas incitam respostas significativas da parcela derivativa do controlador esses três problemas são bem conhecidos na engenharia de controle e muitas soluções já foram propostas para eles entretanto não vou dar spoiler Neste vídeo Então imagina que você devesse resolver cada um deles no seu projeto Como que você faria isso me conte aqui nos comentários o e entrevista nos anos 90 Nicolas comentou sobre a recepção do paper de 42 Ele conta que na
época o asm mandava até print dos papers que são versões preliminares dos artigos para os inscritos da conferência assim as pessoas poderiam fazer comentários mais assertivo sobre os trabalhos e depois da apresentação do trabalho deles que foi conduzida por ziggler um avaliador de uma empresa Rivals criticou duramente disse que tudo que eles tinham era uma receita de bolo que portanto aquilo não tinha nenhum valor digno de uma conferência sobre teoria de controle não havia nenhuma teoria ali É mas no fim após esses comentários uma pessoa do fundo da plateia se levantou e disse Nós também
recebemos o pré print testamos nos processos de nossa empresa e funciona e de fato método deles funciona para muitos sistemas mais do que isso a importância dos métodos designa irenicus é inegável pois o trabalho deles abriu portas para ideias de sintonia automática e online de controladores e outros métodos baseados em ensaios a semente plantada de que talvez controladores possam ser projetados com mais dados e menos modelos gerou frutos colhidos até hoje espero que tenha gostado do vídeo até a próxima por hoje era isso não esqueça de curtir o vídeo e se inscrever no canal além
disso esse video é um oferecimento dos apoiadores do canal se você quiser saber mais como se tornar um apoiador a descrição desse vídeo
Related Videos

12:58
Como funciona um PID? De uma forma bem sim...
ADS Solution
35,482 views

Snowfall Jazz Cafe | Slow Jazz Music in Wi...
Jazz Cafe Ambience
15:20
O Controlador PID: Equações
Luis Antonio Aguirre
5,926 views
23:40
MET 382 PID Controller Tuning
Damon Sisk
1,112 views

54:28
Teleología y diseño en el universo - Pablo...
Pablo Daniel Sisterna
133 views

Classical Piano & Fireplace 24/7 - Mozart,...
Odd Eagle

22:19
What is a PID Controller? | DigiKey
DigiKey
98,395 views
33:01
Designing a PID Controller Using the Ziegl...
Christopher Lum
164,878 views

Healing Forest Ambience | 528Hz + 741Hz + ...
Healing Energy Frequency

45:25
Curso de Arduino Para Iniciantes: Aula 1 (...
Lobo da Robótica
138,202 views

Soft Jazz Music On A Peaceful Winter Day ❄...
Cozy Jazz House
11:42
What Is PID Control? | Understanding PID C...
MATLAB
1,853,904 views
9:12
Sintonia de Controladores PID - Método Zie...
Hugo Rafael Nogueira Gomes
61,417 views

lofi hip hop radio 📚 beats to relax/study to
Lofi Girl
15:00
Ziegler Nichols PID Tuning Method Using Si...
Higher Meditations
57,234 views

22:57
COMO FUNCIONA O CONTROLE PID em Controlado...
RH Materiais elétricos
31,444 views
22:24
Sistemas de Controle (aula 08) Erro em reg...
Eng. Luís César Emanuelli
29,915 views

🎅🏻 CHRISTMAS JAZZ 2025: Christmas Carol ...
Happy Jazz Music

21:08
Simbologia, terminologia de instrumentação...
Mundo da Automação Industrial
32,527 views

19:53
Controlador PI - Projeto pelo Método do Lu...
Prof. André Murilo
6,333 views