Understand SAP EWM - Layout-oriented Storage Control (LOSC)
19.3k views1188 WordsCopy TextShare
WMexperts.online: Intralogistics & SAP EWM
Hey Guys! In this SAP EWM tutorial video, we will learn something about the Layout-oriented Storage ...
Video Transcript:
hi my name is Henrik and I'm the founder of W expert online a platform for web-based SI p ET m consulting this video here is part of our series called understand si PWM where we are trying to explain and describe the core features the core concepts and ideas behind the core features and functionalities that means you will not be showing you with all those details that you can get on say P health or in all those books which are available but rather concentrate on making you understand the main concept and ideas this video right here
is about the layout oriented Sturge control functionality concept as mentioned before and we would really appreciate it in case you leave us a comment either right here just below the video or on our website and just let us know whether you liked the video whether did you did not like the video whether you have any ideas how we could improve and yes I know this is not state-of-the-art audio equipment but I really don't know whether anybody will be watching these videos so I promise I will invest a bit of money in case and I will
find some followers here but yeah rather just let us know what you think and now we could improve or give us some topics that you would like to see in one of our next videos one last point from my side there's a disclaimer on WN experts that online / disclaimer and this is also valid for all the contents that we publish with these kind of videos that's it from my side I will hand over to our lovely assistant Inga and get back to you after the core part of the video and you can just relax
lean back and soak up some EWN knowledge have fun you for the beginning let us stay away from the system and try to understand what layout oriented storage control would look like in real life imagine you go for a city trip in order to see a famous sight you arrive by train and need to find away from the train station to the site the site is over ten kilometers away from the train station and in addition to this there is a river crossing the city so there is no option to reach the site on foot
there might be a bridge across the river but you are not sure so the first thing you can do is go to the closest taxi station and tell the driver that you want to see this famous sight we are the first movement here train station to taxi station using your feet as a mode of transport the taxi driver is happy to give you right but unfortunately tells you that there is no bridge at all so the only thing he can do is drop you off at the landing pier of the ferry do you agree as
you have no other option it is too far for walking so we see the second movement here taxi station to landing pier using the taxi as a mode of transport having arrived at the landing pure the last step is easy you take the ferry and arrive at your final destination the last movement from landing pier to the site uses the ferry as a mode of transport to sum up we could not go directly from the train station to the site so we had to splitter a path into different sub paths when we started the first
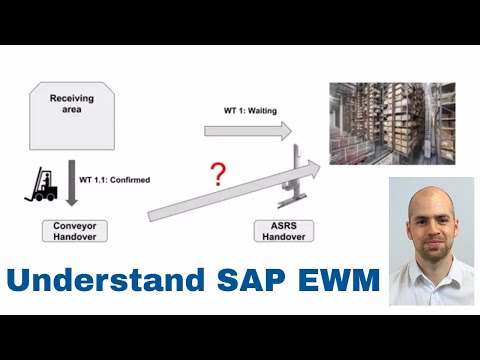
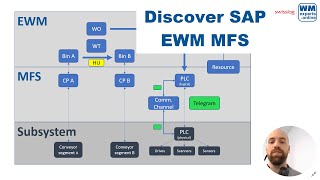
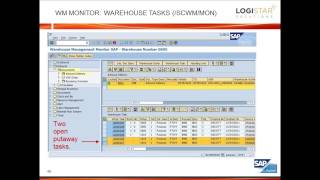
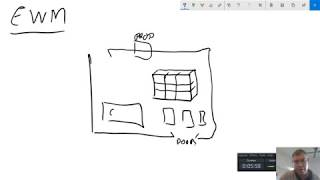
sub path we did not know how exactly we would reach the destination but people on the way see the taxi driver helped us so what would that look like in a warehouse now again we make it short and easy we receive a pallet and we want to store it on a bin in our automated storage and retrieval system our ASRs is nothing but a pallet rack which is operated by a couple of automated storage and retrieval robots so no option to put away with the forklift which is the only resource we have in the receiving
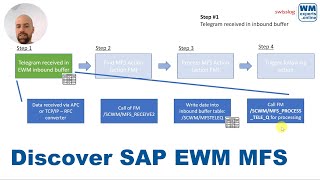
area we create our initial wares tasks from the receiving area to the destination bin in the pallet rack but based on the loc customizing the system knows that this whereas tasks cannot be confirmed in one step thus it is created in waiting status and separate where his task is created to send the palette to the handover place of the conveyor this warehouse task is using the forklift as a resource to process having arrived at the conveyor the system checks again whether a direct movement to the destination business possible or not we need our storage robot
for the put away so the next where's task is created to send the pallet by the conveyor to the ASRs hand over here we have the option to communicate directly with the PLC's using the inbuilt EMFs component of sa pwm our second wears tasks uses the conveyor as a resource to process it once we reach the ASRs handover and the storage and retrieval robot picks up the pallet the system checks the L OSC customising again this time there is no intermediate bin left so we activate the first whereas task updated source bin and conduct the
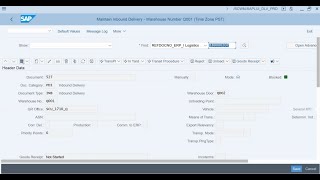
movement here we use a storage robot as a resource to process it just a quick look at a sample customizing again this is a simplified view as we're not interested in all details and possible configuration options at this point for our example flow we would need at least two records the first record would have the receiving area as the source storage type and the pallet rack as the destination the intermediate bin for this record would be the conveyor handover the second record would have the conveyer handover as a source storage type and again the pellet
rack as the destination the intermediate bin for this record would be the ASRs hand over Thank You Inga I would like to close this video with four additional points this time first point a very interesting note about how you can realize a flow rate based process in ewm using layout oriented stretch control the link is right below this video second point is your skills so beside practical and experience try and arrow it is very important from all perspectives we have a good theoretical base so I put you the links to our most favorite readings one
for function one for technical and one for material flow and business and related knowledge and topics third one is our service tambien experts taught online the IBM consulting either remotely using tools like gyro or slack on-site support whatever fits your needs and the last one is our channel so feel free to subscribe you will find the button somewhere here and will be notified about new videos thanks for now leave us a comment give us a like and I hope to see you next time
Related Videos
5:47
Understand SAP EWM - Levels of Serial Numb...
WMexperts.online: Intralogistics & SAP EWM
4,958 views
30:34
Discover SAP EWM MFS - Deep-dive Layout-or...
WMexperts.online: Intralogistics & SAP EWM
2,635 views
16:37
Understand SAP EWM - Pick Points
WMexperts.online: Intralogistics & SAP EWM
3,232 views
30:00
SAP EWM- Layout Oriented Storage control(L...
Studyuuu SAP MM / EWM
1,801 views
8:52
Understand SAP EWM - Wave Management & Res...
WMexperts.online: Intralogistics & SAP EWM
13,638 views
11:11
Discover SAP EWM MFS - What is SAP EWM MFS?
WMexperts.online: Intralogistics & SAP EWM
4,154 views
36:37
Reveal SAP EWM - Storage bin sorting durin...
WMexperts.online: Intralogistics & SAP EWM
302 views
28:02
Discover SAP EWM MFS - The Identification-...
WMexperts.online: Intralogistics & SAP EWM
1,502 views
19:27
SAP EWM Overview for Beginners
Jh Softech
559 views

8:47
SAP EWM Training - Layout-Oriented Storage...
KnowYourEWM
2,968 views
22:34
Discover SAP EWM MFS - The EWM-PLC integra...
WMexperts.online: Intralogistics & SAP EWM
4,613 views
22:00
Understand SAP EWM - Warehouse Order Creat...
WMexperts.online: Intralogistics & SAP EWM
12,920 views
59:12
EWM Webinar Series_ Part 1_EWM_Inbound Proces
LogiStarSolutions
33,402 views

49:44
SAP EWM Layout Oriented Storage Control |S...
Online Coaching
1,700 views

13:40
SAP EWM Training - BADI Implementation in ...
KnowYourEWM
8,510 views
44:19
SAP EWM & S/4 HANA Chapter 1.1: Key Concep...
Tim Heb (SAP Trainers Group)
54,033 views

17:59
SAP Extended Warehouse Management (SAP EWM...
Westernacher Consulting
14,273 views

21:15
Discover SAP EWM MFS - Rearrange HUs in mu...
WMexperts.online: Intralogistics & SAP EWM
1,260 views
19:02
The difference between EWM and WM and what...
Steven Chittenden
13,521 views

8:47
SAP EWM Training - Pick HU Creation with P...
KnowYourEWM
8,013 views