Motores de Passo
29.08k views2156 WordsCopy TextShare

Mentalidade De Engenharia
Como funcionam os motores eléctricos, motores de passo explicados. Aprenda como funcionam e porque s...
Video Transcript:
Este é um motor de passo é um tipo de motor elétrico que pode ser controlado com precisão Vamos aprender os tipos básicos e como funcionam Neste vídeo patrocinado pela Dean Force km Solutions se quiser ver um motor de passo em funcionamento deve checar a válvula ccmt Light da denforce uma válvula de regulação de pressão elétrica altamente confiável otimizada para refrigeração transcrítica CO2 pode ver a válvula ccmd Light em 3D no site da denford e até usar o seu smartphone para digitalizar o código QR para colocar a válvula na sua mesa usando realidade aumentada esta é
um excelente forma de interagir com a válvula e muitos dos seus outros produtos clique no link na descrição abaixo para experimentar um motor de passo é um dispositivo que converte energia elétrica em movimento mecânico é alimentado com corrente continua numa certa sequência controlada que provoca rotação a rotação pode ser continua tanto no sentido para frente como no sentido inverso ou podemos controlar a rotação em pequenos passos para um controle de alta precisão o motor ainda pode parar num ponto desejado e manter esta posição isso é mais avançado do que um motor CC padrão que só
pode rodar continuamente tanto no sentido para frente como no sentido inverso portanto os motores de Passos são muito mais úteis na automatização e fabricação porque oferecem controle de precisão encontramos motores de passo que são utilizados em vários lugares desde impressoras 3D máquinas CNC scanners de impressora ou até válvulas de expansão eletrônicas em Sistemas de refrigeração de precisão a forma como os motores C6 ca funcionam pode ser consultada nos nossos vídeos anteriores deixarei um link abaixo na descrição do vídeo o motor está ligado a um driver de motor que contém essencialmente alguns interruptores eletrônicos que são
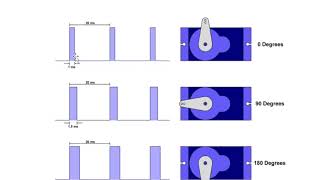
capazes de ligar e desligar a alta velocidade um controlador determina quando ligar e desligar estes interruptores normalmente segue algum código para o efeito o driver é tipicamente uma placa de circuito dedicada especificamente Concebida para essa aplicação e o controlador Pode ser por exemplo uma unidade PLC ou até um pequeno Arduino simples e barato os interruptores vão permitir que a eletricidade flua em impulsos através das bobinas do motor veremos isso em instantes cada impulso recebido faz com que o motor Rode um passo um motor de Passo típico é concebido para ter 200 Passos O que significa
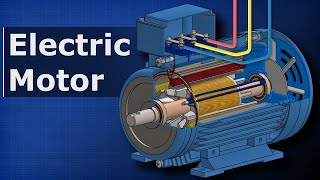
que seriam necessários 200 impulsos para completar uma rotação completa do eixo uma rotação completa seria de 360 graus Então se forem necessários 200 passos para ao conseguir então 360 graus divididos por 200 Passos significa que cada passo faz com que o eixo gire 1.8 graus a velocidade de comutação e a ordem em que os interruptores são controlados irá determinar a velocidade de rotação e também o sentido da rotação existem vários tipos de motor de Passo este tipo é um motor híbrido mais frequentemente utilizado vemos que o motor é composto por Duas tampas e o corpo
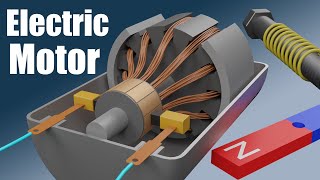
principal o eixo sai de uma das extremidades e as ligações elétricas encontram-se geralmente na extremidade oposta dentro do motor vemos dois rolamentos ligados em cada extremidade do eixo estes mantém o eixo no lugar e asseguram uma rotação suave fixados ao eixo encontramos o rotor o rotor e o eixo rodam simultaneamente o rotor é um imã permanente que tem duas metades conhecidas como copos um copo é o Polo Norte e o outro é o Polo Sul há uma série de dentes entalhadas na superfície exterior de cada copo os dentes dos dois copos não se alinham são
deslocados um do outro para que os dentes de um copo se alinham com os entalhes do outro copo a volta do rotor está o estator o estator permanece estacionário e não roda este consiste num número de bobinas de Arame que rodeiam o rotor as bobinas não estão ligadas entre si este exemplo existem oito bobinas que estão ligadas em dois grupos de quatro o condutor controlará quando a corrente elétrica puder fluir através destas bobinas isso cria um campo eletromagnético que provoca a rotação há também dentes a volta do perímetro interior do estator Estes são utilizados para
aumentar a precisão do motor e criar um alinhamento magnético o rotor tem mais dentes do que o estator por exemplo o estator pode ter 48 dentes enquanto o rotor tem 50 dentes essa diferença significa que nem todos os dentes serão capazes de alinhar ao mesmo tempo quando um conjunto de bobinas é energizado as bobinas irão formar Campos eletromagnéticos com polaridades Norte e Sul o rotor é um imã permanente e esse irá interagir com o campo eletromagnético dos estatores provocando a rotação do rotor as bobinas se ligaram e desligaram e a polaridade de um campo eletromagnético
das bobinas se inverterá cada vez que se ligar isso provoca a rotação do rotor porque as bobinas do estator irão atrair e repelir o campo magnético dos corpos sabemos que Os imãs irão interagir os extremos opostos irão atrair enquanto os extremos semelhantes irão repelir quando a corrente flui através de um arame cria um campo eletromagnético se envolvermos o arame numa bobina cria um campo eletromagnético maior e mais forte com um polo norte e um Polo Sul invertemos a polaridade alterando a direção da corrente podemos ligar e desligar o campo magnético da bobina ao simplesmente permitir
ou parar o fluxo de corrente mas o campo magnético de um imã permanente está sempre ligado Se colocarmos um imã no centro e o deixarmos rodar livremente podemos utilizar outros imãs para o rodar também podemos colocar imãs em torno deste e controlar a rotação controlando a corrente que flui através de cada bobina quanto mais bobinas utilizarmos mais precisa ser a rotação uma forma simples de controlar as bobinas é como uma ponte H se imaginarmos que o motor tem duas bobinas e cada bobina está ligada a quatro interruptores se fecharmos os interruptores 1 e 4 a
bobina 1 se polariza atraindo o rotor depois fechamos os interruptores 5 e 8 provocando a rotação do rotor por causa da Atração e repulsão dos Campos magnéticos depois fechamos os interruptores 2 e 3 a polaridade se inverteu e o rotor Gira em seguida fechamos os interruptores seis e sete para voltar a rodar o rotor depois fechamos os interruptores um e quatro para completar a rotação a sequência dos interruptores continua fazendo girar o rotor a inversão da sequência inverte o sentido da rotação a alteração da frequência de comutação controla a velocidade os interruptores são eletrônicos em
vez de manuais o que nos permite programá-los para ligar e desligar como um time preciso mas adiante no vídeo veremos mais detalhes sobre os controles também já abordamos como os transistores funcionam anteriormente Estes são um tipo de computadores eletrônicos Vou deixar um link na descrição do vídeo abaixo para você o primeiro tipo de motor de passo que iremos analisar é o motor de imã permanente Este é um design bastante simples consiste num rotor de imã permanente que é diametralmente magnetizado nesta versão simplificada temos quatro bobinas ligadas com dois pares separados cada par está ligado a
uma fase diferente quando o par um Energisa o imã roda para se alinhar com isso o par seguinte é energizado e isso faz com que o rotor gire novamente e além as bobinas continuam a se ligar e desligar e a corrente flui em diferentes sentidos para criar a rotação neste design o motor gira 90 graus em cada passo isso poderia ser melhorado com mais bobinas ou mais polos magnéticos ao redor a relutância variável do motor de passo é um pouco diferente esse tipo utiliza rotor de Ferro macio ferro magnético ou seja este material é atraído
por um campo magnético mas não é um imã permanente neste design temos quatro dentes no motor também podemos ver que existem três conjuntos de bobinas cada conjunto ligado a uma fase diferente repare que é um número diferente de bobinas e dentes de rotor O que impede que os dentes de rotor todos ao mesmo tempo neste caso vamos utilizar três interruptores para controlar o motor quando o interruptor 2 se fecha as bobinas magnetizam e atraem os dentes do rotor provocando a sua rotação em seguida o interruptor 3 fecha e o rotor volta a girar para se
alinhar com o campo magnético depois o interruptor 1 fecha-se e o rotor gira esta sequência se repete depois neste design o rotor roda 30 graus com cada passo existem múltiplas formas de reduzir o ângulo de Passo por exemplo adicionando uma quarta fase e mais dentes o motor de Passo híbrido é a versão mais frequentemente utilizada é um híbrido porque é uma combinação da relutância variável e de rotores de Passo de imã permanente Considerando esta versão simplificada com quatro bobinas ligadas em dois pares temos o rotor magnetizado axialmente O que significa que os polos estão em
extremos opostos o rotor tem três dentes em cada polo magnético há um número diferente de dentes e bobinas para evitar que todos eles se aliem ao mesmo tempo quando energizamos as bobinas elas formam pólos Norte Sul estes interagem com o campo magnético permanente dos rotores o dente do Polo Sul dos rotores é repelido pelo Polo Sul dos estatores e é também atraído para o Polo Norte dos Estados Unidos entretanto o dente do Polo Norte dos rotores é repelido pelo Polo Norte dos estatores e atraído para o Polo Sul dos estatutos o que provoca rotação em
seguida o próximo conjunto de bobinas é energizado os campos magnéticos dos rotores são novamente atraídos e repelidos pelas bobinas do estator O que provoca a rotação isso continua com os diferentes conjuntos de bobinas a serem energizadas e a inversão da corrente para alterar a polaridade da bobina neste exemplo cada passo é de 30 graus portanto agora quando olhamos para um motor de Passo híbrido mais complexo podemos ver o mesmo a acontecer mas com maior precisão existem quatro bobinas divididas em dois grupos de quatro o rotor tem 50 dentes e o estator tem 48 dentes quando
as bobinas são energizadas criam Campos magnéticos que interagem com o imã permanente dos rotores ao olhar mais de perto podemos ver que cada vez que a polaridade da bobina muda faz com que o rotator Rode um passo que neste caso é de 1.8 graus Note que cada vez que gira apenas os dentes mais próximos da polaridade Norte das bobinas do estator se alinham os outros dentes do rotor não lembre-se de que o rotor contém um imã permanente que é magnetizado axialmente o que significa que os polos estão em extremos opostos assim enquanto os dentes do
Polo Sul dos rotores se alinham com as bobinas de polaridade Norte dos estatores os dentes dos rotores do Polo Norte se alinham com as bobinas de polaridade sul do estator esse design nos dá uma precisão e um binário muito elevados existem múltiplas formas de controlar a rotação do rotor iremos ver algumas versões simplificadas de como estas funcionam utilizando um motor de imã permanente o primeiro método é o de acionamento por ondas que é o mais simples é aqui que é apenas uma fase é ativada de cada vez para criar rotação o ângulo de passo é
grande e como resultado a rotação não é muito suave o binário do motor também é baixo quando se utiliza este método por isso raramente é utilizado Depois temos o passo completo que é semelhante exceto que duas fases são ativadas ao mesmo tempo o rotor é atraído para ambas as bobinas de modo que em vez disso toma a média das bobinas e se alinha entre elas o binário é muito mais elevado utilizando este método Depois temos meio passo isso energia é uma única fase depois duas fases depois uma única fase depois duas fases que proporcionam uma
rotação muito mais suave e um ângulo de espaço mais pequeno o rotor se alinha com uma bobina depois a média de duas bobinas depois uma única bobina depois a média pelo fato de quem determinada circunstâncias apenas uma bobina é ativada o binário está lá para reduzir o método final é o micro passo que é o mais popular com este método vemos duas fases serem energizadas uma ligada lentamente enquanto a outra é desligada lentamente a corrente está aumentando em uma e diminuindo na outra alterando a força do campo magnético isso resulta numa onda se no soidal
em vez de um impulso tal como acontece com os outros métodos de controle o controle por micro Passos permite uma rotação muito suave confira agora um dos vídeos na tela para continuar aprendendo sobre engenharia elétrica e eu te vejo lá para a próxima lição não se esqueça de nos seguir no Facebook Twitter Instagram
Related Videos

15:31
Como funciona um motor eléctrico - Motor C...
Mentalidade De Engenharia
111,538 views

7:56
APRENDA A IDENTIFICAR OS FIOS DE UM MOTOR ...
WR Kits
89,765 views

14:44
Wallbox Test: So wird im P3 Energy Lab get...
go-e D/A/CH
21 views

15:18
Motor sem escovas - como funcionam BLDC ES...
Mentalidade De Engenharia
185,905 views
10:03
How does an Electric Motor work? (DC Motor)
Jared Owen
19,223,387 views
18:07
Tutorial de ajuste dos servos para o braço...
Kicks
81 views

10:19
What is a STEPPER ENGINE? Meet stepper mot...
Engenharia Detalhada
119,838 views

14:15
Servomotor Explicado
Mentalidade De Engenharia
141,129 views

28:22
Resistências explicadas
Mentalidade De Engenharia
1,308,186 views

10:55
What is BRUSHLESS ENGINE? Unlocking the Po...
Engenharia Detalhada
369,507 views
15:34
How Electric Motors Work - 3 phase AC indu...
The Engineering Mindset
6,573,318 views

14:02
Como funcionam os relés
Mentalidade De Engenharia
52,822 views

18:45
A Corrente Eléctrica Explicada
Mentalidade De Engenharia
52,418 views

9:53
Driver WD-42 4.2A Wotiom e Motor de Passo ...
Marlon Nardi
48,809 views

13:45
Motor Tesla Modelo 3 - A Engenharia Brilha...
Lesics português
1,370,184 views

25:03
EU VOU ensinar FAZER GERADOR de energia el...
DEVANDO
176,924 views

9:47
Motores de Passo diferenças entre Nema 17 ...
EDUKATIKA
34,219 views

16:12
Brushless Motor - How they work BLDC ESC PWM
The Engineering Mindset
4,746,007 views

9:35
Compreendendo os enrolamentos de motor elé...
Lesics português
430,735 views

14:01
How Stepper Motors Work - Electric motor
The Engineering Mindset
1,091,921 views