Lecture 7: Convolutional Networks
59.87k views12936 WordsCopy TextShare
Michigan Online
Lecture 7 moves from fully-connected to convolutional networks by introducing new computational prim...
Video Transcript:
all right welcome back to lecture seven today we're going to talk about convolutional neural networks which is finally the major class of models that we'll use to process images going forward so if you'll recall at the last lecture we were talking about the back propagation algorithm which we could use to compute gradients in arbitrarily complex computational graphs in particular we saw that the use of this computational graph data structure made it very easy to compute gradients without having to use tons and tons of paper or lots of white board space or something to derive these
complex expressions instead we were able to compute gradients in expressions of arbitrary complexity by implemented by using the back propagation algorithm to walk forward over the graph and then the forward pass to compute the outputs and then walk backward over the graph in the backward pass to compute the gradients and we had this local viewpoint of the back propagation algorithm where now in order to imp in order to add a function or use a function inside of a computational graph we needed to implement this little tiny local operator that would come that would know how
to compute the app its outputs during the forward pass given the inputs and then in the backward pass would know how to compute the gradients with respect to its inputs given the upstream gradient of its out of the loss with respect to its outputs so now now all we need to do in order to plug in new types of functions into our computational graphs is just have them conform to this little modular gate API that we talked about last time and then at the end of last time we ran into a bit of problem so
so far in this class we've talked many times about the linear classifier and now we've hopefully gotten some familiarity with these fully connected neural network classifiers we saw the book that especially the fully connected neural network classifier was a very very powerful model that could flexibly represent many different functions but both of these classifiers had a problem so far and that problem is that neither of these two classifiers worst respect the 2d spatial structure of our input images if you'll recall both of these classifiers required us to take our input image that has some spatial
structure and has some color about some RGB color values at every point in space and now destroy all of that spatial structure by flattening our images this long vector that we could feed into our linear classifiers or our fully connected networks and this seems like a problem with we're going to work with image data that somehow whenever you build a machine learning model it's very useful to build models that somehow take advantage of the structure of the input data and now in order to make take advantage of this spatial image structure of our input image
data the solution is relatively simple now that we've built up all this machinery around computational graphs and back propagation in order to build neural networks that respect the spatial structure of our input data all we need to do is define a couple of new operators that know how to operate on images or on spatially structured data so that's what we're going to talk about today is a couple new operators that we can introduce into our neural networks that will operate on this two-dimensional spatial data in particular so far when we talk about fully connected networks
we're very familiar with these two basic components of fully connected networks we have the fully connected layer but gives the fully connected network its name which is a matrix multiply between the input vector that now produces an output vector and recall the other critical component of these fully connected neural networks was this nonlinear activation function I'm showing the the Ray Lu activation function here on the slide now when we move from fully connected neural networks to convolutional neural networks we need to introduce a couple extra basic operations that we can use inside the computational graphs
or models in particular so then today we'll talk about three of these operations that let us move from fully connected to convolutional networks in particular we talked about convolution layers pooling layers and normalization layers so first let's see how we can extend the idea of the fully connected layer which as you'll recall destroyed all of the spatial information and input and move on to the convolution layer which will serve a similar role in that it will have learn above eight that will now respect the 2d spatial structure of our inputs so if you'll recall to
look for the fully connected layer the one one way to look at what it's doing is that during the forward but it's in today's lecture and going forward we're only talking about forward passes and it's sort of up to you to use the machinery from last lecture to know how to figure how to derive gradients for all of these expressions so we'll be talking exclusively about four passes from this point on and now so then to recap a little bit one way to look at the fully connected layer is that during the forward pass it
receives some vector if that vector is perhaps a flattened C far ten image then it would be a vector of 3072 scalar diamond elements being 32 by 32 by 3 and now during the forward propagation operation of the fully connected layer we just simply multiply that vector with a weight with a weight matrix to produce an output vector now now the convolutional layer is still going to have this flavor of operating on an input use doing so that have it you have operating on it with a weight matrix in some way and then producing an
output of the same general type in particular the convolution layer now will input a three-dimensional tensor that is a three-dimensional volume that is no longer a flattened vector so for something like CFR 10 image the in at the very first layer of a convolutional Network that's operating on a C part time image that input volume would now be a three dimensional tensor of three by 32 by 32 where that number three refers is is called the channel or depth dimension of the input tensor in the case of a C part n image it has three
channels the red blue and green color channels for the raw input image and then we the 32 and a third the other two thirty twos are the height and the width of this three dimensional tensor and now the just as our input in our input tensor has some three-dimensional spatial structure with a convolution layer our weight matrix will also have some kind of three-dimensional spatial structure in particular the the weight matrix also called sometimes a filter in the terminology of a convolutional layer will be a little free dimensional chunk in one example it would be
that we might have a convolutional filter of size 3 by 5 by 5 and here the idea is that we're going to take this little convolutional filter and we're going to slide it over all spatial positions in the input image to compute another three-dimensional but here first notice that there's a constraint here between the shape of the input sensor and the shape of one of these convolutional filters in particular the depth dimension of the the number of depth channels in the input tensor always has to match the number of depth channels in one of our
convolutional filters that is to say that this that this that this convolution operation always extends over the full depth of the input tensor we'll see some examples of convolution operations that relax this and I think next lecture but for the purpose of today you should always consider the convolution as extending over the full depth of the input tensor and now in order to compute our output what we're going to do is take that little five by five by three filter and stick it somewhere inside the the input image and now that three by five by
five chunk of filter will then align itself to some little three by five by five chunk of that input sensor and then once we've aligned the filter to some spatial position in the input tensor then we can compute a dot product between the filter and the corresponding elements of the input tensor and this is just a dot product just as we've seen in fully connected networks before where but now rather than taking an inner product between a row of a matrix and the entire vector now it's an inner product between one filter and a little
tiny locally local spatial chunk of the input tensor and so in this example are three by a five by five chunk of the input image would result in a dot product of seventy five elements and it would also be common to add a bias as with most machine learning models it's very comments have a bias whenever you have a weight but for purposes of clarity on the slides will often omit biases but you should remember that they're usually there so then by by positioning this Spade this filter at one position and the input in computing
this inner product we end up computing a single scalar number that tells us effectively how much does this position in the input tensor match up with this one filter that we've computed so that will give us one element of the output tensor and now to end now we will repeat this process and take this input filter and slide it around at every one of the every possible position in the input tensor and each one of those positions will result in a single number giving the dot product between the tensor the weight tensor and the local
chunk of the input at that position so in this example if we had a 32 by 32 input and a 5.5 filter if you kind of imagine how that's going to work in your head work it's going to result in 22 28 by 28 grid of possible positions at which we could stick that filter and for each of those positions it results in a single number resulting from that dot product so the result of convolving this one convolutional filter or kernel with our input tensor will be an output tensor of shape one by 28 by
28 but of course it's never enough to just have one convolutional filter so in fact a convolutional layer will always involve convolving the input image with a set or a bank of a different filters with different weight values so we can consider convolving now our image with a second convolutional filter I'm shown here in green to represent that it has though maybe different values of the weights and but when we convolve with the second green convolutional filter we perform the exact same operation we take this five three by five by five convolutional filter and we
slide it over all positions in the input and compute an inner product at each position and this produces a second one by 28 by 28 output plane giving all the responses of the input image to that second convolutional filter and of course and these these are these 28 by 28 output planes we sometimes refer to as activation maps of the neural network because these are somehow now two-dimensional maps showing how much does each position in the input response to each one of our convolutional filters in the in layer and of course we don't have to
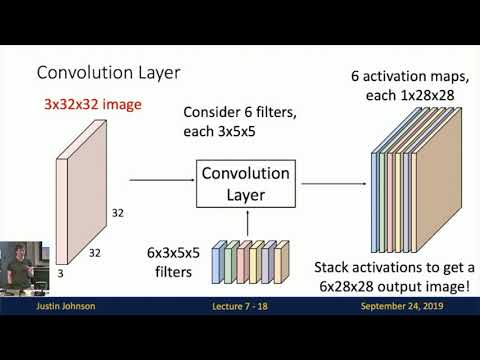
stop at two filters in general week will come a convolutional layer will involve convolving with some arbitrary number of filters that is a hyper parameter that you can set so in this example we're showing convolving our input tensor with six convolutional filters and now at the bottom you can see our six convolutional filters we have six convolutional fill each of those convolutional filters has size 3 by 5 by 5 3 being the number of inch input channels from the input tensor divided by 5 being the spatial size of the filter and now we can collect
all six of our fill of our convolutional filters into a single four dimensional tensor that now has shaped six by three by five by five and now that and but this this four dimensional tensor has this particular structure this in particular interpretation as being a set of three a set of six three dimensional filters and then when we convolve each of those filters with the input image we get one activation map for each filter now so now we can consider concatenating all of those activation maps which are the responses of the input image to each
of our six convolutional filters and we can concatenate all of those activation maps into a single three dimensional tensor which in this example has size 6 by 28 by 28 so now this looks just like another input image because that mez convolutional layer has then taken a three dimensional tensor with some depth dimension 3 and some height and width 33 by 32 and it's converted it into another 3-dimensional tensor where now maybe the height and the width have changed but the but the the spatial structure has been preserved and all of the computation inside the
computational layer always written out respects the local structure of the image and of course I mentioned that these convolutional layers always have a bias so for completeness here we're showing it explicitly now the bias we always have one bias term per convolutional filter so in this example with six convolutional filters the bias is simply a vector of six elements that gives us a constant offset that we offset each of the feature maps in the output by each of the corresponding bias values and of course this can write so then the output is then a 28
by 28 grid and so far we've been there's there's kind of two useful equivalent ways to think about the output of a convolutional layer one is this note one is this notion of activation maps that we can think of these different 28 by 28 maps or slices of the output where each of those activation maps represents the degree to which the entire input image had responded to one of those filters and that's one useful way to think about the spatial structure of the output of a convolutional layer but a second way to think about the
output of a convolutional layer is that it gives us a 28 by 28 grid which is a spatial grid get corresponds roughly to the same spatial grid of the input tensor and now at each position in that spatial grid the convolution layer computes a feature vector in this Dement in this example a six dimensional feature vector which tells us something about the structure of the structure or the appearance of that input tensor at each position in the spatial grid this maybe seems kind of trivial about whether you're slicing it this way or slicing it this
way but depending on whet how you're thinking about convolution in different contexts it's sometimes useful to think of it either as a collection of feature Maps or as a grid of feature vectors so it's useful to have both of those concepts in mind when you think about the output of a convolutional layer and of course we will almost we it's very common when actually performing convolution in practice to perform it on batches of images so then rather than having rather than operating on just a single three dimensional tensor giving us a single input image instead
it'll be common to operate on a batch of three dimensional tensors and of course given a collection of three dimensional tensors we can group them into a single four dimensional tensor where the batch dimension at the beginning a corresponds to independent images that were processing in this convolution layer so the general form of a convolution layer looks something like this the it will receive a four dimensional input a four dimensional tensor as input and that four dimensional tensor as input will have shape n for the batch dimension the number of elements in our mini batch
by CN is the number of channels in each of those input images in the batch then by it we'll have two spatial dimensions HW that will give us the spatial size of each of the input elements and and then the output will always have the same batch dimension because this convolution layer processes each elements in the batch independently and now the output will have a Willis that will have a channel dimension see out and the see out channel dimension might be different than the C in channel dimension and the output will of course also have
some new spatial extent H Prime and W Prime which might be different from the spatial extent of the input image is this operation of what's happening inside the convolution layer I'll clear very good so now because this convolutional layer it takes as input a three dimensional or four dimensional tensor and then produces a four dimensional tensor as output so we can imagine stacking a whole sequence of these convolutional layers all ends to N and by doing so build up a neural network whose basic elements are now no longer fully connected layers but are instead convolutional
layers so here's an example of what that might look like for a little cartoon convolutional network with three convolutional layers here we're imagining working on C part n so the input image has three channel dimensions for red green and blue and 32 height and width spatial dimensions then we will operate on it with our first convolutional layer that we'll have now the weight matrix here is six by three by five by five you should interpret that recall as a set of six convolutional filters each of which has an input channel dimension of three to match
the input image and each of which has a local spatial size of five by five so then we will convolve each of those five by five filters with the input to get our 28 by 28 spatially sized output and the depth channel of that output will now be 6 for those six filters in that first convolutional layer and then we can repeat the process so now we've just got another three dimensional tensor we can pass it on to another another convolution operation and now for the second convolution operation we can see the weight the weight
matrix has shaped ten by six by three by three which again means that we have ten convolutional filters each of those convolutional filters has a depth dimension of six to match that that input tensor and the spatial size of these filters is now three by three and that would produce another output and then that then we stacking more and more convolutions on top of each other and there's of course many and just as we use this terminology of hidden layers when we were talking about fully connected networks we can use the exact same terminology with
respect to these convolutional networks so here this would be a 3 layer convolutional network with our input in red our first hidden layer in blue and our second hidden layer in green but there's actually a problem with this convolutional network that I've written down on this slide can anyone spot what might be a bad thing about this particular design yeah so what happens if we stack multiple convolution layers directly on top of each other it's well Egypt convolution operation is itself a linear operator so when we stack one convolution directly with another convolution it actually
is another convolution so just as just as you might recall from the example of a linear classifier when we sorry of a fully connected Network if we had tried to build a fully connected Network by stacking two fully connected layers directly on top of each other then it had the same representational power as just a single fully connected layer and the same thing happens with convolution layers because they are also linear operators so if we stack two convolutional layers directly on top of each other the result is still has the same representational capacity as another
convolutional layer although perhaps with a different filter size or a different number of channel dimensions but it's still a convolutional layer so then to overcome this problem we use the exact same solution that we saw with the fully connected networks which is that we in between each of our linear convolution operations we need to insert some kind of nonlinear activation function so we will very commonly use the rate of activation function that operates element-wise on each element of this three dimensional tensor just as we did in the exact same way for our fully connected networks
yeah question the question was why are there five bias terms for the first convolutional layer and the answer is because I have a typo on the slide so thank you for pointing that out right so a very student that maybe I was testing you that was supposed to have sixth bias terms for each of the six filters in that first convolutional lair good that hopefully means that it's been very clear what these what these layers are supposed to do so then another question you might ask is that as you recall from our study of linear
classifiers and fully connected neural networks we always were able to somehow visually inspect the weights that were learned at the first layer of the network so we might ask the same question for a convolutional Network is there some way that we can visually inspect or visually interpret what the weights at that first layer of the convolutional neural network are so you're I think you've seen this many times now the linear classifier we had this interpretation a learning a bank of templates one template per class and then the this was expanded with our fully connected neural
networks but now learned a set of a set of templates in the first layer which were not tied to any particular class but the each of the templates in the fully connected network expanded extended over the full size of the input image so the fully connected Network and the first layer learned this Bank of templates each having the same size as the input image well the convolutional network has a very similar interpretation that except that now rather than learning a set of templates that are the same size as the full input image instead now it's
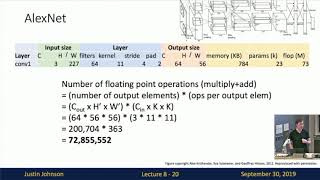
learning a set of templates that are small and local in size so here I'm showing some learned templates from Alex net trained on image net and in the first layer of alex net it actually has an 11 by 11 convolution on the outputs with 64 filters so then we can visualize each of those 64 filters as a little 11 by 11 RGB image and then we can get some sense for what these filters are learning and these filters from Alex that are very typical of what you tend to expect to learn in the first layer
of a convolutional network we can see that many of these filters learn something like an oriented edge detector that they learn maybe edges that detect maybe vertical horizontal edges or vertical edges in different orientations and with different frequencies so you they they look sort of like local edge edge detectors or local wavelets another thing that's very common to see in convolutional network filters is this notice these opposing colors so we can see that some of these filters have like a green blob next to a red blob and that's somehow looking for up opposing colors in
a particular orientation in the image so then the interpretation of what is the feature map at the second after we apply this first convolution operation each of the maps in each of the activation maps in that 3d output tensor gives the degree to which each position in the input image responds to each of these 64 by 64 filters or equivalently when we had this viewpoint of the output of the convolution as a grid of feature vectors then that tells us that maybe for Alex net it gives us a 64 dimensional feature vector at every position
in the input image and the court and the elements of that feature vector corresponds to the degree to which the corresponding chunk of the input matches up with each of these templates that's learned in the first layer and if you'll recall back to Hubel and Wiesel experimenting on the cat they found that the cat visual system tends to be tended to respond to these local regions of edges local patterns in the visual field of the of the cat's eyes and that's kind of a similar effect that's going on with these learned convolutional filters in the
first layer of a convolutional network so then we can dive in and look a little bit in a little bit more detail at the exact spatial dimensions of a convolution operation so here we have an input image that so now I've kind of Trant transposed it and dropped the depth dimension so now the depth dimension is going into the white into the into the screen and I'm hiding it because that's kind of it's not relevant on your thinking about the spatial dimensions so here we have an input image of spatial size seven by seven and
we imagine convolving with a convolutional filter of size three by three so then to see what spatial size the output should be we just need to count the number of spots that we can drop down that fill in this input image so we've got one two three four five so that means that there were five positions that we could have dropped a 3x3 filter into a 7x7 image which means that the spatial size of our output should be will be five by five and in general if our input has some size W and the filter
has a kernel size of K then the size of the output will be w minus k plus 1 right the idea is that we've been right that the number of positions we can drop the filter is actually less than the number of positions in the input because it we bump up against the edge of the input along the edges and corners of the input image now this seems like potentially a problem this means that every time we perform a convolution operation in this way every convolution operation is going to reduce the spatial dimensions or input
tensor so then that puts some constraints on the depth of the networks that we might be able to train that for example if we use a three by three convolution we're going to lose two pixels of resolution every time we do a convolution which puts an upper bound on the number of layers that we could potentially put in our network because eventually the spatial Dement the spatial size of our image would just evaporate away to nothing if we used enough convolutional layers and that seems like a problem we don't want the number of layers in
our model to be constrained by this evaporative nature of the convolution operation so to fix that we often introduce padding around the borders of the image before we apply the convolution operation so here's an example where we're applying a padding of a padding of one which means that before we do the cut before we perform the convolution operation we add a extra of pixels around that around the border of the image and fill them all with zeros this is called zero padding there's very you might imagine there's different strategies you might use for how you
might pad out the input you for example you might think to maybe pull the nearest neighbor value from the border of the image or you might imagine a circular padding value or you know you you take as you go up the right-hand side of the image maybe you start copying values over from the left or other other schemes like that but it turns out in practice the most common thing that we do when training convolutional neural networks for padding is simply to add zeros it's simple it's easy and it seems to work quite well so
that's this now introduces an additional hyper parameter into a convolution layer so now when we're building a convolution layer we need to choose both the number of both the filter size and the number of filters in the layer and also the amount of padding that we're going to apply in inside the convolutional layer and now once we've generalized our convolution layer in this way to accept padding then the output size now becomes W minus K + 1 + 2 P where P is the padding value and a very common way to set that high per
parameter P is to set it equal to the kernel size minus 1 over 2 that means that suppose we're doing a 3x3 convolution then we pad with 1 if we do a 5x5 convolution you pad with 2 on each side and that that is called same padding because it means that when we apply the convolution the output will now have the exact same spatial size as the input so even though padding is an extra hyper parameter technically that you can play around with the the most common thing to do for padding is actually same padding
so this this just makes it easier to reason about the spatial sizes because it means that the spatial size tends not to change when we perform our convolution operation now another thing another useful way to think about what the convolution is doing is this notion of a receptive field so here we're showing an input grid I'm showing our input image and then the output grid the spatial grid of the output after performing a convolution operation and recall that we had this interpretation of the convolution as taking our convolutional filter matrix and sliding it around and
taking inner product sliding it around every position of the input what this means is that each spatial position in the output image now depends only on a local region of the input image in particular for a three day 3x3 convolution here one element of that output tensor now only depends on a 3x3 region in the input tensor and this 3x3 region is often called the cept afield of the convolution or of the or of the receptive field of the value in the output tensor this is relatively a relatively straightforward and easy thing to think about
in the context of one convolution layer but it's also interesting to think about what happens these receptive fields as we start stacking convolution layers together so what we can see is that here we're showing a stack of three convolution layers and now on the very right hand side we see that one element in the very rightmost output tensor depends on a three by three region in the second-to-last activation map but and each of those elements in that second-to-last activation map it in turn depends on a three by three region in the input in the in
the second activation map with so that and that which in turn depends on a three by three region in the beginning activation map so that means that transitively this act this green region in the final output actually depends on a fairly large spatial region in the input in there in this input tensor on the far left so in this example with three by three convolutions you can sort of visually see that when we stack to three by three convolutions on one after another then the output of those two three by three convolutions now depends on
a five by five spatial region in the original input and if we stack three convolute three three by three convolutions it now depends on a seven by seven region in the input state feature map so then this is another this is a but then the term receptive field is sometimes overloaded a little bit to mean maybe two different things so then the receptive field of a neuron in the previous layer would be equal to the kernel size of the convolution and sometimes you'll also talk about the receptive field of an activation all the way in
the original image which is the spatial size in the input image that has the potential to affect the value of that neuron after however many convolution layers and what we can see from this diagram is that as we stack convolution layers on top of each other the effective receptive fields in the input is going to grow linearly with the number of convolution layers that we we add but now this is maybe a slight problem because suppose we want to work with very very high resolution images maybe we will want to work with 1024 by 1024
images now that means that in order for our out the values in that output tensor to actually have the ability to see a large region in that high resolution input image the only way that we can do that is by stacking up a very very very large number of convolution layer a convolutional layers so then if maybe we have a 1024 by 1024 image then every 3x3 convolution only adds two pixels to the receptive field so we would need something like 500 convolutions in order to allow the out those final output features to depend on
the full input image and it is having these large receptive fields in the input image maybe seems like a good idea because the neural network needs to be able to get some global context about what is the full image that it's looking at so then a solution to this problem is to add another hyper parameter to our convolution operation yeah was there yeah the question is it's the zero padding it doesn't seem like it's adding any information to the network well it's actually not meant to add any information it's it's more about notational convenience to
prevent the shirt the features from shrinking inside the network although there is actually a type of implicit way the zero padding does actually add some information to the network and that's that it actually breaks translation invariance so with a convolution it's it should be translation invariant right if you imagine shifting the whole image a translation equivariance to be more technical if we shift the entire image then the output should shift correspondingly but once you add a convolution layer it actually gives the network the ability to kind of count out from the border that you could
imagine it learns a convolutional filter that it looks for that row of zeros to know where it is in the input image so actually I think that adding zero padding in this way somehow breaks the translational equivariance of the convolution operation and gives the network some latent or implicit ability to know exactly where it is in the input image I don't know if that's a bug or a feature but how punch that that's something that the zero padding actually is adding the representational power of the network but then back to this back to this problem
we had this problem that in order to achieve these very large receptive fields we need to stash many many convolution layers and now we can open we can overcome that by adding another hyper parameter to our convolution called stride so now we now we go back to our example of a seven by seven input with a three by three convolutional filter but now we want it to have a stride of two that means that rather than placing the convolutional filter at every possible position in the input image instead we're going to place it every two
possible positions in the input image so then the output now then are our first place we can stick it is in still in the upper left-hand corner and now we actually skip over one percent shil one potential position to place the filter because our stride is two and now we place it again so then with a stride of two we can see that there are only three positions in the input where we can place the convolutional filter which means that when we use a stride of two then we are our output is now is quite
a lot spatially down samples and once we add stride to the network that means it can build up receptive fields much more quickly because that that effectually expected adding a layer of the stride of two effectively doubles that receptive field at every layer in the network well rather at the layer in which we have astride of two so now for a little bit of this this more general formulation of how to compute the output shape or size of a convolution if our input has size W our filter has size K our padding is P and
we have a stride of s then we have this expression for computing the size of the output and you might ask here where you can see that the size is dividing by the stride and you might wonder what happens if that integer that's not an integer that's actually divisible by the stride well that's kind of people pay implementation independent but usually you just like trunk you usually will truncate it or round down or round up I don't know it depends on the application but usually we don't do that and usually we set up our convolutional
layers in such a way that the stride always divides that that expression that we're dividing W minus K plus two beats so now here's a little excuse kind of recap all of that here's an example of a convolution that you might use in a C part n network with our input volume of size three channels 32 by 32 spatial size and now we might imagine a convolutional filter with ten filters of five by five with stride one and pad two so what we've given given these settings for the convolutional layer what should the output size
of this of this out of this tensor be after the convolution well here we can apply the formula on the previous slide and it turns out that in this case the spatial size is the same because we're using stride of one and same padding and the number of channel dimensions is equal to the number of filters so now the output size is 10 by 32 by 32 and now as a recap what would be the number of learn about parameters in this layer well we have our format we have our we have now ten convolutional
filters each of those filters has size three by five by five and each of those filters has an Associated bias so that means each of the filters has 76 throwable parameters since we've got ten filters we've got 763 little parameters and now another question how many multiply adds does this convolution operation take to compute well to compute this you can think that the network that the output tensor has shaped 10 by 32 by 32 and in order to compute each of those elements at the output we need to compute an inner product between two tensors
each of shape three by five by five so then if you multiply all that together you can see that this convolution operation takes quite a lot of multiply add operations in order to compute its output and also by the way this is something that sometimes trips people up but one thing that's actually used sometimes is a one by one convolution where the kernel size is just one by one and this seems kind of weird but it actually makes perfect sense so for a one by one convolution we might have in this case a spatial input
tensor with 32 channels and 56 by 56 in the spatial dimension and now a one by one combo where would have a convolutional kernel where each with 32 filters each of those filters would be one-by-one and spatial size and 60 and extent over the full 64 channels of the input depth and what this basically means is that we're doing independent dots and then remember we had this interpretation of this these three dimensional tensors as being a grid of feature vectors well when you apply a one-by-one convolution that basically looks like a linear layer that operates
independently on each of the feature vectors in our one by one grid in our in our three dimensional grid and because of that interpretation sometimes it you might see neural network structures where we have a one by one convolution and then array Lu and another one by one convolution and another Ray Lu some sequence of one by one convolutions and Raley's and that's sometimes called a network in network structure because it's effectively a fully connected neural network that operates independently on each of the feature vectors that appear at every position in space so this is
seems like kind of a weird thing to do but actually you'll see it in practice used sometimes so then the recap of a convolution is that it takes this three-dimensional input it has hydro parameters the kernel size in general you might imagine actually non-square kernels that they do show up sometimes but the overwhelming majority is for kernels to be square a number of filters of padding and stride we have a four-dimensional weight matrix and a single bias factor and then it produces an output of four of three-dimensional output according to this particular formula then a
couple very common settings to see with convolutions because a lot of hyper parameters here would be to set oh it's very common to use square filters there's some applications where you might see non square filters it's very common to use same padding to of course the output have the same size as the input and a couple very common patterns in convolution would be it be very common to use like a three by three stride one convolution or a three by four or five by five or one by one stride one convolution you'll see these types
of configurations very commonly and you'll it's also very common to see a convolution layer with three by three kernels padding of one and astride up to that then is a sort of a spatial down sampling by a factor of two using a comm solution layer so these are all settings that you'll see very commonly in convolution yeah the question is would it be preferable to use a one by one convolution instead of a fully connected layer and I think those have slightly different interpretations a one by one convolution has the interpretation of changing the number
of channel dimensions in our three dimensional tensor whereas a fully connected layer has the interpretation of flattening that whole tensor into one and then producing a vector output so that fully connected layer is for cases where you want where you want to destroy the spatial structure in the input so would be common to see that at the end of the network when you need to produce category scores whereas the one-by-one convolutions are very common when you need to like when you need to they're often used as a kind of adapter inside of a neural network
when you need to have a convolutional a 3-dimensional chunk of activation kind of match up with something else that expects a different input number of input channels then it's very common to use a one by one convolution to kind of adapt or change the number of input channels enhancer so they're not they're not often used in the same way so they also I should point out that so far we've talked about two-dimensional convolution because we had the notion of this convolutional kernel so we have three dimensional input and we had a convolutional kernel that we
moved around at every position in that 2d space but there are other types of convolutions that you'll see used out there sometimes so you might imagine a one-dimensional convolution with a one-dimensional convolution our input would be two-dimensional the input would then be a number of channel a channel dimension and one spatial dimension and now the weight matrix would be true of the weight matrix would then be three dimensional so we would have again a bank of filters so we might have C out filters and each of the independent each of the individual filters would be
CN so extend the full depth dimension and then K would be the kernel size again so then it has the interpretation of plopping down this filter and positioning it at every position in 1d space and moving it sliding it over the input and these 1d convolutions are sometimes used to process textual data that might occur as a sequence or they also will use it sometimes to process audio data like if you have an audio waveform that you want to process with the convolutional Network you might use a one-dimensional convolution and we can go the other
way and it's sometimes you'll sometimes see a three-dimensional convolution so with a three-dimensional convolution the each element of the batch will be a four-dimensional tensor so now I can't really draw a four-dimensional tensor on a two-dimensional whiteboard but what then then we had this interpretation of the three dimensional tensor as a three dimensional grid where at every point in the grid we have a feature vector of size C in and then the freedom and become the three-dimensional convolution the filter is then a four dimensional is then a three dimensional thing that's expended sorry a five
dimensional thing where the kernel has three spatial dimensions it extends over the full number of feature dimensions of the input vector and then we have a collection of those things so it's been a five dimensional weight matrix and then each of those three dimensional filters gets Lud's sled at every position in 3d space over that 3d input tensor and these 3d convolutions are sometimes used in maybe to process point cloud data or other types of 3d data where you actually where data actually lives in some native 3d space and it's so then we've seen that
these convolution layers come with quite a lot of hyper parameters to set their inputs and their outputs and their padding and their strides and whatnot so if you look up for example the PI torch in PI torch if you look up the convolution operation there you'll see that you can have all these settings to change all these different settings in the convolutional layer and of course you'll find 1d and 2d convolutions as well so that brings us so then we can see that convolution is this layer that has these learn about weight matrix matrices that
are somehow transforming as we go along which brings us to our next layer that's a key ingredient of a convolutional Network which is a pooling layer and with the way that you should think about pooling layers is that they are a way to down sample inside your neural network in a way that does not involve any learn about parameters we have already seen that we can spatially down sample our inputs in a convolutional Network by using a convolution layer with a stride greater than one well another way to downsample our spatial data our spatial dimension
dimensions of our tensor would be instead to use a pooling fooling there so here it involves no learn herbal parameters we just have hyper parameters which would be the kernel size there's also this the way that this pooling layer is going to function is very similar to a convolutional layer where we're going to operate on we're going to imagine look local receptive fields in the input tensor of some local spatial size of given by the kernel size and then within each of those local regions we will have some pooling function which is some way to
collapse those those set of input values into one output value and then we will apply this this operation at every slice of our input tensor that will then result in some spatially downsample output and one very so one very common way to set up pooling that maybe makes this more concrete would be an example of two by two max pooling with a stride of two which means that our which means now the stride and the kernel size mean the exact same thing as they did in convolution it means that we're going to consider carving up
our input tensor in two spatial regions each of psiy each of size 2 by 2 and we will stride those spatial regions with they'll move by by 2 pixels each unit and now when the stride and the kernel size are equal to each other that means that the the pooling regions will be non overlapping so it's very common to use this setting of stride to kernel size to pooling and now the now we use the maps so then that now we have this interpretation of if we have a four by four spatial input then it
gets carved up into two by two regions given by the different colors here and then within each of those 2 by 2 regions we want to compute a single output number that summarizes the values within that 2x2 spatially a spatial region and when we use max pooling we use the max function to compute that one number so then within that 4x4 spatial region we pick the biggest one and that ends up as the the corresponding bin in the output so then the this what that means is that this this red region in the input gets
collapsed into this single number six because if the largest the green region gets collapsed into the eight and so on so on and so forth and one reason why we might prefer pooling over a strata convolution one is that it's very it doesn't involve any learn about parameters and a second is that it introduces some amount of invariance to translation especially in the case of max pooling so then you can imagine that because the max operation selects the largest value within each of these regions that if somehow the input image would have been some of
some of the stuff in the input image would have moved around a little bit then it's conceivable that the max value might not have changed within the region even if the exact position of something in the image would have changed a little bit what that means is that when we use max pooling it introduces some amount of a small amount of translational invariance model which might be useful for four different types of problems so then pooling has a very similar summary oh and by the way this is max pooling another thing that's very common to
see would be average pooling so here we're computing that output by taking the max in the region it would also be common to take the average of in the region so in this summary for pooling is that it ends up looking quite similar to convolution that we have this V stride and kernel size parameters but now rather than taking inner products instead we apply some kind of fixed pooling function within each of those receptive fields to compute sync our output values so now we now we've got fully connected layers we've got activation functions we've got
convolutional layers and we've got pooling layers and given all of these we can now build a classical combat so given it's now a convolutional network is some kind of neural network that is us that is a composition or combination of all these different operations but you've got a lot of freedom in how you might choose to hook these things up right because a lot of hyper parameters there's a lot of different types of layers but now a very classical design that you'll see in a convolutional network is that we'll have some amount of of comrade
liu pool comm really cool Comrie little pool followed by some number of fully connected layers and that's a very very classical design that you'll see in in convolutional networks and there's a concrete example of that classical ComNet design we can look at the Linette v network from jung that Yamla khun used for character recognition back in 1998 so here with the Lynette five it takes as input a single grayscale image that is 28 by 28 in spatial size and because it's grayscale there's only one input channel which is the intensity of each pixel the first
thing is a convolutional layer with 20 convolutional filters each of 5x5 spatial size and here they're not using a with with same padding and so then our output of after the convolutional layer is then 20 by 28 by 28 and after the convolution we put we put a rail ooh it's pretty common to put that's non-linearity right after a convolution layer and then the next thing would be to apply this 2x2 stride to max pooling that halves the spatial size of that tensor moving it from 20 by 28 by 28 down to 20 by 14
by 14 then if then we apply another convolutional layer that it has now has 50 filters so now our output after that second convolutional layer and it's corresponding gray liu would be 50/50 filter 50 depth dimensions and 14 by 14 spatial dimensions then we have another max pooling that again halves the spatial dimensions putting us down to 50 by 7 by 7 then we'll then before we go into these fully connected layers we have this flatten operation that takes this three dimensional tensor and then flattens it out into a vector like we've done in CFR
ten perfectly connected networks so this flattens out this 50 by seven by seven tensor into a single vector of size 24 50 then we have a fully connected layer with 500 output channels followed by another ray loop that converts us to a vector of size 500 yeah what's your question yeah so the question is what happens with a max pooling if their max is not unique is I think the question then it's kind of implementation dependence so often you'll just pick one and which one you pick will kind of depend on the implementation but it's
also I think it's also not very common for that to happen in practice because I guess for that to happen it might be like the entire region is zero from all Ray lose being zero I think that's real I think that's quite rare to actually happen in practice so even if it happens once in a while it probably shouldn't be a problem yeah yeah that's a good question the question as max cooling introduces some kind of non-linearity so why do we need the Ray Lu here and I think you're right that you actually don't need
the Ray live here and if you actually I kind of put it in here because I think it's it's common to use Ray Lou in modern convolutional networks and everywhere but if you actually look and at Yamla Queens paper they actually didn't use any non linearity in those layers they just use the max the max cooling as the company arity so I think you're right but in more modern networks it's common to put the rail ooh even when you do have a max pool and even if it might not be strictly necessary which kind of
gives you just more regularity in your in your network design and then of course at the end we have another flame fully connected network to produce 10 class scores because we wanted to digit classification and recognized in the cleavage of zero nine and one thing you can notice about this classical ComNet design is that as we go through the network we tend to have the spatial size decreasing either through pooling layers or through strata convolution layers and the depth at the depth channel the number of filters is increasing which means that as the spatial size
decreases the depth increases so somehow this the total volume is always sometimes preserved exactly we're just like squeezing it down this way and stretching it out this way and that's a very common paradigm to see in in convolutional networks yeah yeah the question is how the hell'd you come up with one of these things right I think that's there's that bassy of the question yeah well I think it's a lot of trial and error but actually I think next lecture to save you that pain I want to I'm going to talk about in detail the
history of many convolutional architectures and how they've evolved over the time so that but for the purpose of today's lecture that you should just think of this as magic that yah McCune handed to you in 1998 it happens to work pretty well um but now there's a problem with this classical design we've seen that it's very common to stack up like calm cool ray lucam cool ray Lujan cool ray Lou and you can imagine writing down networks that are arbitrarily deep and arbitrarily big and you'll be excited about your training deep networks on big data
it's awesome but you'll run into a problem that if you use this very classical design of a comm net you'll find that it's very difficult to get networks to converge one thing once they become the very deep so to overcome that it's this then this is actually a more common in a more recent innovation is that we add some kind of zatia layer inside the network that makes it easier for us to train very deep networks and the bat the very most common of these is called batch normalization so the idea is that we want
to receive the outputs from some previous layer and we want to normalize those outputs in some way so that they have a zero mean and unit variance distribution why that's a great question if you read the original paper they say that it reduces something called internal covariant shift which is not well understood exactly what that is or exactly what they were trying to say but the rough idea is that when you're training a deep neural network each layer is looking at the outputs of the previous layer and because all these different weight matrices are training
simultaneously that means that as this way as the weight matrix from the previous layer changes over the course of optimization the distribution of outputs that the next layer will see is also going to change over the process of optimization and somehow the fact that this second layer sees a changing distribution of inputs over the process of training might be bad for optimization in some way is the very course non rigorous idea of what they mean by internal barriers shift so then to overcome this potential problem of internal covariant shift the idea is that we want
to standardize all of the layers to all fit some target distribution in particular we want to force all that the outputs from every layer to have some to be distributed with zero mean and unit variance as that means that the next layer consuming those activations is then hopefully seeing inputs that are from a more stationary distribution over the process of training and this can hopefully stabilize or accelerate the optimization process of these deep networks in some way so then how exactly can we do this well we know that we can normal we can given a
set of samples XK from some distribution X we can normalize them by we can empirically normalize them by reduce subtracting off the mean and dividing by the standard deviation and it turns out that computing and subtracting the mean and dividing by the standard deviation is itself a differentiable function and we know from the idea of computational graphs that when you have a differential function you can just slide it as a layer into your neural network so what we will do with batch normalization is just insert a layer into the network whose purpose is to convert
the inputs to have this more standardized distribution more concretely you can imagine a fully connected version of batch normalization that receive an input of size n for the batch dimension and size D for the vector for the number of dimensions each vector so it's a batch of n vectors each of each of size D and now what we're going to do is along each element of the vector dimension we want to compute an empirical mean over the batch dimension then we use the different samples in the batch to compute what is the average value for
each slot in that vector so then we simply compute the empirical mean over the batch dimension to get this vector mu of size D then given given that we can then look a look and remember the expression for computing the standard deviation of variance and then we know that we can compute the standard deviation in this way that will then give us the the standard deviation of variants per channel for each of those D slots and our input again averaging over the batch dimension and then finally we can normalize to give us 0 mean unit
variance by subtracting the empirical mean and dividing by the empirical standard deviation of course you'll notice that in the denominator we have this plus epsilon term that's to avoid dividing by 0 and that's a small constant it's a hyper parameter but people don't usually play with too much so now there's a slight problem that you know we said we wanted to make our inputs unit mean 0 variance and maybe that will be a good thing for optimization but that's actually quite a stiff constraint to place on the network to force all of these layers to
always have the exactly fit this unit normal to fit this is your mean unit variance of constraint so in so in practice it's common to add an additional operation after this normalization where we add learn about scale and shift parameters gamma and beta into the network where each of these will now be vectors of dimension D that we will take our normalized outputs in the X hat that now the X hat have 0 mean unit variance then we'll add back in this learn about bias and multiply it by this learn about learning will shift a
learnable scale parameter and those are basically allowing the network to learn for itself what are the means and variances that it wants to see in each of those elements of the vector and in particular if the network now has the capacity to learn gamma equals Sigma and beta equals mu which will requite n caused the batch normalization layer to recover the identity function in expectation so that's one intuition about why we want to add these learn about scale and shift parameters back into the network but now there's a problem here with batch normalization which is
the batch part right so then this this mu and this Sigma we were computing by averaging over the batch dimension of our input tensors and that's a very very weird thing to do that's something that we have not seen so far in any operation that we've talked about in neural networks thus far so far whenever we've had a batch of inputs all of our operations always work acting independently on every element to the batch what that meant is that we could stuff whatever we wanted into a batch and it wouldn't like having a picture of
a cat in the same batch as a picture of a dog would not cause them to have different classification scores and now once we have batch normalization that's no longer the case that now the the outputs that you produce for each element in the pack in the batch now depend on every other element in the back and that is a very bad property to have a test time because suppose maybe you're running a web service and you want to like compute like what users are uploading at every point in time then it would be really
bad if you had a network that whose predictions now depended on what different users happen to be uploading at the same time well that would be a very bad property to have in a machine learning model that you're building so in any kind of test time setting it's always preferable to have your models again become independent over the over the elements in the batch so we need to find some so in batch normalization we do that by having the layer actually operate differently during training and during testing so during training the batch normalization layer is
going to take these empirical means and standard deviations over the batch of the data that it sees but during testing it will not compute element it will not compute empirically over the batch instead over the course of training we will keep track of some running exponential mean of all of the average of all of those new vectors and Sigma vectors that we had seen during training and then we will that will become now a fixed scalar that is kind of like the average mu and the average Sigma that had been seen over the course of
training and those are now constants so then at test time we rather than using the empirical means over the batch instead we will use those constant mu and sigmaz which are the the average means and standard deviations over the course of training and in doing that it will allow us to again recover this independence among elements in the batch a test time which is a very good property and there's actually another really really nice property of these using these empirical rather using these running means and very and variances at test time and that's that if
now mu and Sigma are actually constants then this batch normalization operation becomes a linear operation right if you look that now we have our excise we're subtracting a constant and we're dividing by a constant and then we're further for the normalization step and then for the scale and shift step we're multiplying by a learn weight and we're shifting by a learned weight so then a test time the batch normalization operator becomes a linear operator which means that if we put if we if in our convolutional Network we had a design that had convolution followed by
batch normalization then we know that two linear operators can be fused into one linear operator so then actually what's very common to do in practice is to actually perform that fusion in inference time and then actually fuse these these empirical meet these running means running standard deviations and learned scale and ship parameters and actually fuse them into the previous convolution operator in the network what that means is that now batch normalization becomes free at test time it then has the zero computational overhead at test time because we can just fuse at test time into the
the previous linear operator so it's a very nice thing about batch paralyzation that makes it very nice in practice so then we've seen batch normalization in the context of fully connected networks it's also very common to use batch normalization in convolutional networks to see how that works in the context of convolutional networks in the context of fully connected networks we were averaging over we had this input X of size n by D and then we were averaging all over the batch dimension to produce these empirical means up size one by D and then we at
me scale and shift to produce the output now for convolutional networks it looks very much the same except now rather than averaging only over the batch dimension we will average over the batch dimension as well as over both the spate both the spatial dimensions of the input which means that now our our scale our mean and standard deviation will be vectors of size C on our scale of shift learned scale and shifts will also be vectors of size C and then we can compute these outputs using this broadcast functionality that you're familiar with in pipe
works by now so then it's very common to add batch normalization in your networks directly after a convolutional or a fully connected layer and what's very nice empirically about batch normalization is that it makes your network strain a lot faster so here's a plot from the paper that introduced batch normalization so here the the black dashed line is this baseline network that is has it hosing only convolution and pooling and these other operations with no batch normalization and now the the the red dashed line is simply adding Bachelor malaysian after all the convolution layers and
making no other changes so the training or the architecture of the network and you can see that simply by throwing bash normalization into this model it trains much much faster but another property another nice property about batch normalization is that empirically when you are training networks that have batchman with normalization then you can tend to increase the learning rates much much higher without diverging during convert during during training so then here the then this other this blue solid line is then the same network with the higher learning rates during training and bash colonization and you
can see that by combining batch normalization in the model and higher learning rates were able to train this deep network much much money master and this is actually a very robust finding that occurs across many many different convolutional network architectures but there are some big downsides in batch normalization one is that it's really not very well understood theoretically there's this kind of hand waving around internal covariant shift but I think it there's not really a clear understanding of exactly why it helps optimization in the way that it seems to and another problem with batch normalization
is that it actually does something different between training time and test time and that seems like a problem that actually is a source of bugs in like many many applications and like myself personally on like multiple different research projects I've gotten bitten by this by this the fact that that penalisation does different things during training at test time sometimes it's just like a bug in your code and you forget to flip the mode between train and test and then you're very sad or sometimes if your data is somehow imbalanced in a way that it might
actually be inappropriate for your model to be forcing this normalization constraint on your data so then for maybe problems versus looming like image classification with balanced image classes maybe this unit may be this couch or this 0 main unit variance normalization is appropriate but for other types of models where you expect very imbalanced inputs or very imbalanced data sets that can actually be a big problem and I've been bitten by batch normalization multiple times but for a code of feed-forward convolutional networks that tinia set it to work really really well now one variant on batch
normalization that you'll sometimes see right so we said that one of the problems with batch normalization is that it behaves differently during training time at test time and that's maybe bad for a lot of reasons right you're because you want your network to do the same thing at training and testing during training it was trained to do this thing and now at test time if you swap out the way the one of the layers functions then it the rest of the model wasn't trained to to operate productively with that moat that layer in another mode
so in general you we generally prefer layers that operate the same way a training end test time so one variant of batch normalization that's been proposed that operates the same at training and test time is called lair normalization and here the idea is very similar that we're still going to compute some means and standard deviations and do this empirical normalization but the difference is that rather than computing the average over the batch dimension instead we'll compute the average over the the feature dimension D and now this that now this this normalization no longer depends on
the other amount all our other elements in the batch so we can use the same operation at training and test time and this layer normalization operator is actually used fairly commonly in recurrent neural networks and transformers that we'll talk about in later lectures another kind of a kind of equivalent one one version of lair and of equivalent thing to layer normalization that you'll see in images is called instance normalization here rather than averaging over the batch and spatial dimensions we averaged only over the spatial dimensions and then again we only buy it because our means
and standard deviations don't depend on the batch dimension we could do the same thing at training a test time there's this beautiful figure that kind of gives us some intuition of the under the the relationship between these different types of normalization that if we have a tensor with a batch dimension a channel dimension and some spatial dimensions then you can see that Bosch normalization averages only over the bat over the batch and spatial dimensions layer normalization is averaging over the spatial and channel dimensions and instance normalization is averaging only over the channel dimension and because
there's an empty slot on the slide you should expect that there's another type of normalization that was proposed to this paper are called group normalization a couple years a year or so ago and here the idea is that you split the channel dimension into some number of groups and you normalize over different subsets of the channel dimension and that actually tends to work quite well in some applications like object detection so now we've seen these different components of a convolutional Network and you might be wondering um do you have a lot of freedom here and
how you can recombine these things I've kind of given you a set of ingredients that you can use to build neural network models that are aware of the 2d structure of images but I haven't really told you any best principles about how actually to combine them and go about building neural networks that actually work well so that will be the topic of next week's lecture so come back and actually learn how to build neural networks I have a lot of other stuff here that we're not going to be able to get to maybe that'll come
some other time so let's skip to here and the problem is how do we actually build these things in a way that makes sense and then we'll talk about that in next next week's lecture
Related Videos
1:12:03
Lecture 8: CNN Architectures
Michigan Online
49,636 views

1:11:16
Lecture 6: Backpropagation
Michigan Online
113,716 views

23:01
But what is a convolution?
3Blue1Brown
2,887,873 views
1:19:01
CS231n Winter 2016: Lecture 7: Convolution...
Andrej Karpathy
170,411 views
3:44:18
Understanding AI from Scratch – Neural Net...
freeCodeCamp.org
520,618 views
1:13:27
Lecture 12: Recurrent Networks
Michigan Online
38,770 views

1:12:22
Lecture 9: Hardware and Software
Michigan Online
28,317 views

1:07:58
MIT 6.S191: Convolutional Neural Networks
Alexander Amini
120,581 views
57:56
Lecture 1: Introduction to Deep Learning f...
Michigan Online
236,132 views
1:25:05
Build a Deep CNN Image Classifier with ANY...
Nicholas Renotte
667,034 views

1:09:58
MIT Introduction to Deep Learning | 6.S191
Alexander Amini
895,876 views

34:48
Convolutional Neural Nets Explained and Im...
James Briggs
24,186 views

1:17:40
Lecture 9 | CNN Architectures
Stanford University School of Engineering
438,970 views

1:08:56
Lecture 5 | Convolutional Neural Networks
Stanford University School of Engineering
665,081 views

1:19:14
Lecture 11: Training Neural Networks II
Michigan Online
27,687 views

2:25:52
The spelled-out intro to neural networks a...
Andrej Karpathy
2,228,646 views

1:01:28
How convolutional neural networks work, in...
Brandon Rohrer
212,548 views
1:11:53
Lecture 13: Attention
Michigan Online
71,823 views
1:15:30
Lecture 7 | Training Neural Networks II
Stanford University School of Engineering
351,819 views