[Introdução à Robótica] 10 - Sensores - Encoder Incremental
8.63k views1837 WordsCopy TextShare
Luccas Brando
Aula destinada aos alunos do curso Técnico de Automação Industrial do CET Congonhas.
Video Transcript:
o olá turma de automação aqui é o professor lucas estamos aqui mais uma vez para nossa disciplina de introdução à robótica e dando sequência um assunto que a gente inicia no último vídeo que é sistema de sensoriamento do manipulador robótico e no último vídeo a gente abordou há duas formas que a gente consegue mensurar a posição de um manipulador robótico então a gente trabalhou com dois sensores principais a gente conheceu aí princípio de funcionamento do lvdt que consegue trazer para gente resultado de deslocamento linear né então poderia ser o último a situação de robôs cartesianos
mas o principal objetivo da gente falar sobre lvdt a gente entendeu seu princípio de funcionamento que através de tensões induzidas através de acompanhamento magnético e utilizar esse princípio de o funcionamento para entender o rvd te né que é o princípio básico de funcionamento do resolver são luís ou ver ele é uma forma de medir deslocamentos em uma rotação rotisseria deslocamentos angulares nós vamos conhecer hoje o nosso terceiro instrumento que vai fazer é esse tipo de medição eo manipulador robótico também é um tipo de sensor dedicado a medição de posição angular principalmente bom então esse sérgio
eu tô falando com vocês é o encode o encoder também chamado decodificador óptico pode ser usado para medir posição angular instantânea ou seja no momento em que relacionado ou deslocamento angular relativo alguma coisa o a algo que a gente precisa de ferir uma referência pode ser usado também para medir velocidade e aceleração até de forma mais simples tá então esses incômodos eles vão ser posicionados quando a gente está falando de manipulador robótico eles vão ser posicionados nos motores e não diretamente nas juntas porque isso vai proporcionar maior resolução de operação para a gente então a
gente vai conseguir maiores pontos de programação né maiores pontos de mapeamento quando a gente tem esses encontros colocados nos motores e aí e a gente vai ter dois tipos principais de em cores ficou incremental encoder absoluto os dois tipos nós vamos conhecer hoje mas o que é importante destacar para vocês é que os dois tipos de encoder vão funcionar à base que de fotossensores tá quê que é um fotossensor provavelmente você já estudaram esse dispositivo lá na disciplina de instrumentação mas vamos dar uma recordar daqui esse tipo de foto sem a sua é um sensor
de área ou seja a gente só vai ter como saída deles era um esse tipo específico que a gente vai usar nos em cores a gente é tem o que a gente chama de emissor e de receptor então a gente vai ter uma parte responsável por emitir a luz né pode ser um diodo foto um diodo emissor de luz tá a gente vai ter uma segunda parte é responsável por receber essa luz tá esse dispositivo o foto sensor funciona com a base de que se eu tiver algum objeto aqui no meio impedindo essa passagem de
luz e é a gente vai ter acusado pelo receptor de que o nível que tá chegando aqui essa eram se não tiver nada impediu nessa passagem de luz a gente vai ter acusado pelo receptor que a a onda é de luminosidade e a luz tá chegando ou seja nível alto então a gente fala que é um sucessor binari porque ele só provoca dois tipos de identificação dos tipos de leitura nível alto se a luz tá chegando nível baixo se a luz não tá chegando e a gente interpreta isso já acordo com que tá acontecendo no
processo né se a luz não tá chegando significa que tem alguma coisa obstruindo a passagem dela né aí pode ser usado para contagem por exemplo e é o que vai ser o princípio fundamental de funcionamento do em coaching tá como todo o sensor é óptico a gente tem que ter alguns cuidados principalmente com relação à ambientes que vão empoeirar é muita poeira poluição que dificulta a leitura do receptor com relação ao sinal está chegando é mas se tiver só os cuidados que a gente já viu que a gente conhece referente a instrumentação objetivo hoje é
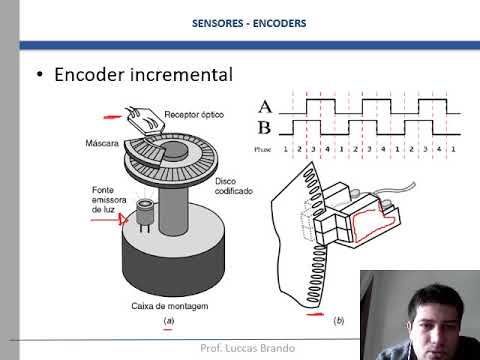
entender como que se encontrem vai funcionar e observe aqui eu vou começar a falar com vocês não encoder incremental o nosso incômodo incremental nada mais é do que um disco com regiões em que ele vai ter furos né ou seja vai permitir a passagem da luz e regiões ou facas que não vão permitir a passagem da luz tá pra vocês podem pensar aí como o disco que próximo à borda deles tem vários furinhos né que a gente consegue perceber isso bem aqui na nossa figura b tá o disco próximo à borda a gente tem furinhos
a gente vai ter conectado em certa posição um sensor foto sensor que de um lado né esse daqui é o meu fotos em sou de um lado ele vai emitir a luz e do outro lado ele vai receber a luz só observando a figura a aqui ó a nossa fonte de emissão né nossa fonte de luz e aqui em cima o nosso receptor de luz que o nosso disco codificado então a gente fala de encoder incremental pelo fato de que é ele vai estar girando ele vai estar acoplado ao eixo do motor então ele vai
girar junto com o motor e como ele tá girando tá passando vários furinhos ali pela fonte de emissão e passando também regiões opacas ou seja onde vai impedir a passagem de luz a gente vai ter como resultado no no receptor óptico de que é como se ele tivesse piscando né a medida que ele vai girando ele vai piscando então do ponto de vista prático o que a gente tem é a geração de uma onda quadrada né essa onda quadrada quando a luz é detectada e liga o alto cor da luz não é detectada é nível
baixo como ele tá girando alternando nos detectados não detectada a gente tem a construção de uma onda quadrada que vocês percebam que o seguinte nessa figura ver eu tenho dois fotos sensores e logo ao lado do outro né um fiz a marcação de vermelha outra marcação de amarelo aqui se você já estiver apenas um fotossensor e a gente vai ter o problema de que a gente consegue contar a velocidade a gente consegue contar o número de pulsos né o número de reconhecimentos da luz mas a gente vai ter alimentação de que a gente não consegue
perceber é para que lado que ele está girando então a gente pode contar 10 pulsos mas 10 pulsos para direita ou para a esquerda então isso traz para a gente uma limitação para identificar o posicionamento do eixo então a gente usa dois tipos de fotossensores na realidade de 2 fotos sos juntos porque esse pequeno deslocamento que existe entre eles provocam um atraso então eu tô chamando ali de foto censurar o que é o meu vermelho foto se é subir que é o meu amarelo ele vai primeiro passar pelo ar depois passar pelo ver o primeiro
passar pelo ver depois pelo ar dependendo do sentido de rotação então se ele tiver girando no sentido horário ele primeiro passa pelo ar depois pelo b se tiver girando no sentido anti-horário primeiro passa pelo b depois pelo ar isso aí permite a gente identificar além da quantidade de pulsos o sentido de rotação do nosso eixo se a gente tem sentido de rotação e quantidade de pulsos a gente consegue ter terminar de forma efetiva qual que é a posição que o eixo vai estar no momento que a gente tiver fazendo uma análise e e aí e
esse golden incremental ele é comum no dia a dia nosso e eu falo para vocês aqui um exemplo que ao menos estão aí em casa apesar de nos últimos 10 anos o mouse com funcionamento a base de sensor infravermelho ficou bem comum né é a gente tem um mouse de bolinha lá do passado não é tão antigo né mas funcionamento funcionando a base de incômodos quando você tiver algum mouse que funciona a base daquela bolinha na casa de vocês podem abrir vocês vão perceber dentro dele u2 os componentes responsáveis por meio de os pulsos de
luz tá dois componentes responsáveis por vende os pulsos de luz que são os nossos fotos sensores e vocês vão perceber também os discos dos encores a todos furadinhas aqui então a gente tem 2 discos um para para simular o nosso movimento vertical outro para simular o nosso movimento horizontal então o nosso mouse antigo de bolinha funcionava à base de dois encoders g1 bom então breve resumo do que eu falei até aqui sobre incômodos incremental sobre o encoder incremental é cada pulso é detectado pelo receptor óptico e ele representa o incremento então a gente sempre vai
ter essa situação de incremento a gente vai ter vários pulsos problema do encoder incremental ele não tem memória então se a gente tiver uma falha de alimentação em qualquer que seja o momento a gente não vai conseguir identificar onde que é o eixo do rotor parou um novo início vai ser o novo zero então é a gente pode ter um problema de posicionamento quando isso acontece uma forma de corrigir isso é fazer uma trilha secundária paralela trilha principal em que a gente vai ter toda essa trilha opaca e apenas um único buraco ele que vai
significar o nosso ponto zero então a gente vai precisar o reconhecimento óptico para essa telha secundária tá é um problema mas é possível resolver é o único foto você achou é capaz de só de medir somente a velocidade aceleração justamente por aquele problema que eu já comentei com vocês que a gente não tem a definição de que para qual lado que o eixo do motor tá girando né então a gente usa é dois fortes sensores para conseguir identificar é sim o eixo do motor tá girando no sentido horário ou anti-horário para conseguir a posição angular
correta dele e por fim a questão de resolução acho que fica implícito aí na nossa análise que quanto mais furinhos né quanto mais regiões transparentes a gente tiver no nosso disco maior nosso resolução tá então essa resolução vai depender do diâmetro do disco se a gente tiver um disco mais lá com maior diâmetro a gente consegue fazer mais furos neles né e vai depender da distância entre dois furos são duas janelas né que são as regiões transparentes então a gente consegue definir o número de pulsos a partir dessa equação é então o número de pulsos
vai ser igual afe vezes o diâmetro do disco dividido por duas vezes a distância entre uma hoje a gente consegue ver filha a quantidade de pulsos o que um disco a partir desta equação aí beleza
Related Videos
![[Introdução à Robótica] 11 - Sensores - Encoder Absoluto](https://img.youtube.com/vi/eZ6cDoDyJBY/mqdefault.jpg)
9:03
[Introdução à Robótica] 11 - Sensores - En...
Luccas Brando
8,555 views

10:08
What is the Difference between Absolute an...
RealPars
795,837 views

12:17
COMO funciona e como instalar um ENCODER i...
Brasiltec
42,617 views
12:22
Aula teórica e prática de sensores indutiv...
Prof.:Elias Faustino - Cursos Online em Animação
55,649 views

8:58
ENTENDA HOJE: FUNCIONAMENTO PRÁTICO DO ENC...
WR Kits
14,431 views
8:40
What is Encoder?
RealPars
962,819 views

7:28
¿ Como es un encoder incremental por dentro ?
Cambatronics Online
15,643 views

14:41
How 3 Phase Power works: why 3 phases?
The Engineering Mindset
1,352,091 views

12:05
Wirtz pumps are really clever
Steve Mould
14,238,417 views

3:01
How does a Resolver work? - Technical anim...
learnchannel
303,089 views
16:47
The Problem with Wind Energy
Real Engineering
2,765,597 views

1:58
COMO FUNCIONA O ENCODER INCREMENTAL?
Aucavili Automação & Controle
18,148 views
29:37
Nature's Incredible ROTATING MOTOR (It’s E...
SmarterEveryDay
2,990,291 views

11:02
HOW AN ENCODER WORKS
GelasioMaker
3,606 views

9:06
O que são Encoders Absolutos?
Treinamentos Técnicos FA Pepperl Fuchs
1,054 views

19:26
How did the Enigma Machine work?
Jared Owen
9,886,866 views

31:05
O que é um Enconder e como funciona? | INS...
Viver de PLC
13,885 views

5:02
COMO CONECTAR OS CABOS DO ENCODER NO INVER...
Aplicando Automação Industrial com Joney Canuto
6,084 views
19:22
Mechanical circuits: electronics without e...
Steve Mould
7,083,947 views